Многофункциональная модульная платформа IntCS

IntCS является отечественной цифровой платформой, направленной на комплексное решение задач управления и автоматизации в сферах специального станкостроения и робототехники.
ПРИНЦИПЫ ПОСТРОЕНИЯ
• Открытая архитектура.
• Модульный принцип построения.
• Цифровая реализация.
• Вариативность форм-фактора.
• Кроссплатформенность аппаратных и программных средств.
• Поддержка широкого спектра оборудования.
• Готовый набор сложных алгоритмов управления движением.
• Развитые инструменты настройки и диагностики.
• Низкий порог вхождения.
• Собственное производство основных компонентов системы.
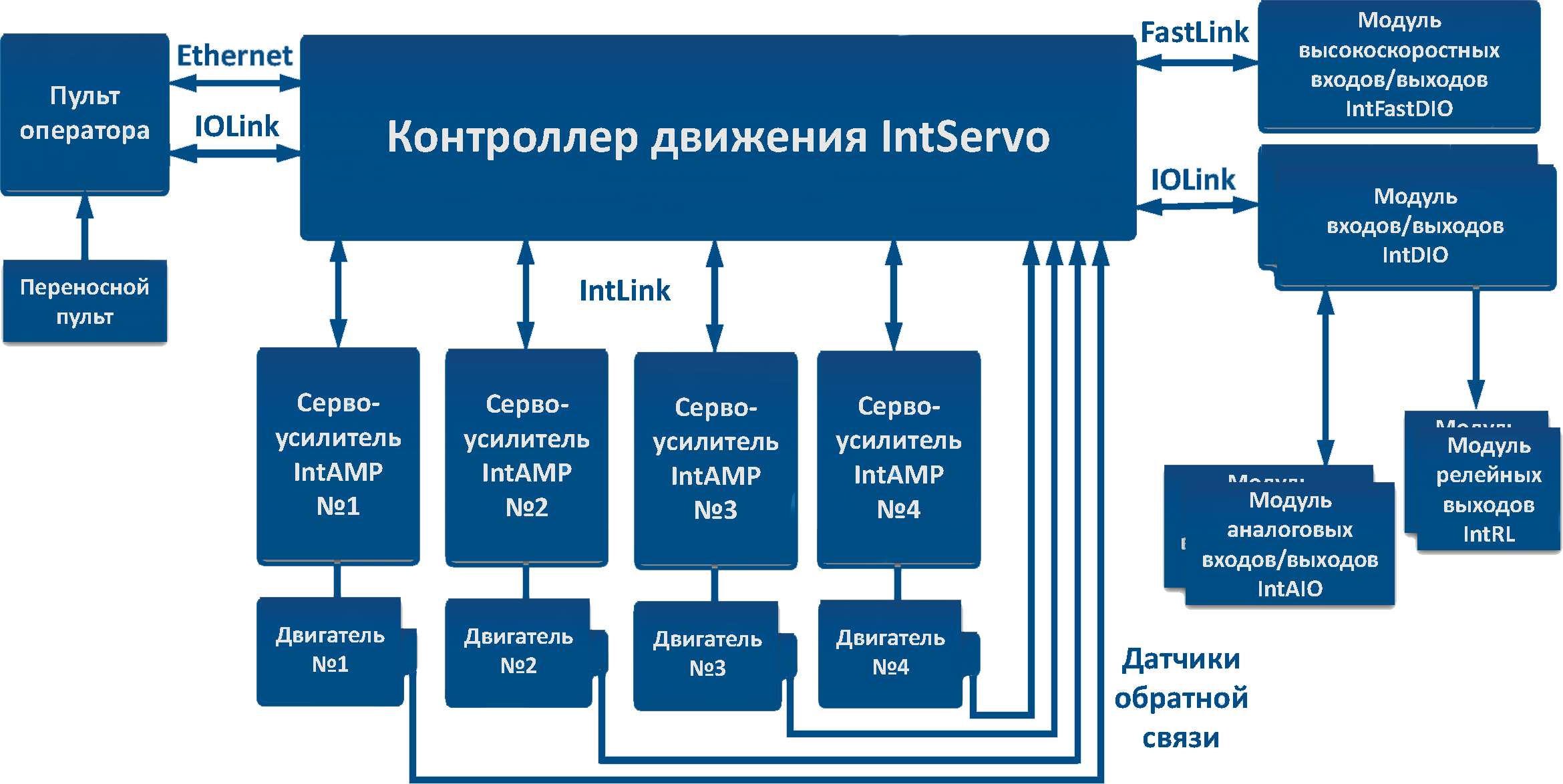
СОСТАВ
В состав IntCS входят:
• контроллер движения IntServo;
• сервоусилители IntAmp;
• периферийные модули ввода/вывода IntFastDIO и IntDIO;
• терминальные устройства для организации ЧМИ;
• многоуровневое программное обеспечение.
IntCS объединяет все компоненты в единую масштабируемую и соответствующую современным стандартам платформу посредством высокоскоростных цифровых интерфейсов.
| Количество осей: IntLink/Сеть | 32/256 |
| Количество координатных систем | 16 |
| Количество датчиков обратной связи | 32 |
| Количество входов/выходов | до 1024 |
| Частота работы сервоконтура | 10 кГц |
| Типы двигателей | Асинхронный, синхронный, постоянного тока, шаговый, гидравлический, линейный, пьезодвигатель |
| Типы датчиков обратной связи | Инкрементальный ТТЛ, синусно-косинусный, EnDat 2.1/2.2, SSI, BiSS. Опционально: резольвер, HiperFace, Fanuc, Omron, Yaskawa, Delta, Mitsubishi, Tamagawa |
| Интерфейсы | Ethernet, RS-422, USB |
| Управление движением | • Линейные оси и оси вращения. • Управление осями раздельно и в составе координатной системы. • Режим «ведущий-ведомый». • Управление портальными механизмами (Гентри-системы). • Электронный кулачок. • Формирование профиля траектории с заданными ограничениями по ускорению и рывку (расширенный Look-Ahead). • Задание кривых разгона/торможения по времени участков s-кривой, по величине ускорения и рывка. • Временно́е масштабирование движений (timebase). |
| Управление электроприводом | • Цифровое интерфейс. • Контуры управления моментом, скоростью и положением. • Регулятор с упреждающими связями. • Полиномиальные фильтры до 7-го порядка (опционально). • Адаптивное управление. • Режим ослабления поля (АД). • Изменение параметров регуляторов «на лету». • Пользовательский регулятор. • Алгоритмы обработки аварийных ситуаций. • Поддержка датчиков температуры. |
| Программирование | • Язык высокого уровня на основе стандарта ANSI C. • Библиотека математических, тригонометрических и логических функций. • Средства алгоритмического программирования. • Синхронизация программ в различных координатных системах. • Встроенный контроллер логических программ. • До 32 одновременно работающих программ ПЛК. • До 4 программ ПЛК «жесткого реального времени». • Механизм задания приоритетов выполнения программ. |
| Контроль и безопасность | • Многоуровневая система безопасности. • Ограничение рабочей зоны. • Контроль максимальных тока/скорости/ускорения. • Контроль датчиков конечного положения. • Программные и аппаратные ограничители. • Сигнал разрешения работы преобразователя и контроль ошибок. • Контроль ошибок линий связи. • Защита от потери сигнала ДОС. • Предел по ошибке слежения и току. • Сторожевой таймер. • Проверка четности буферов программ и интерфейсов. |